.png)

作为一家无人机企业,大疆在所属的赛道内做到了头部,成为全世界最强的无人机公司,这样的履历也让大疆成为国内明星科技公司之一,其每次重大的变革也都会引起行业的关注。
在去年4月份,大疆正式推出了大疆车载品牌,开始全力布局智能驾驶。作为巨头企业的跨界布局,大疆车载发布之初就成为行业关注的对象。
另一方面,凭借着大疆在软硬件方面的深厚积累,很多行业内人士都对大疆的跨界非常看好。
品牌推出一年之后,大疆终于交卷了,和上汽通用五菱合作开发的KiWi EV车型,首次在量产车上展示了辅助驾驶能力。

而大疆的玩法也和国内众多无人驾驶公司不同,大疆并没有走多传感器、高算力、高成本的高举高打战略,而是选择了低调务实的道路,其推出的L2级辅助驾驶的成本非常低,因此首次上车就登陆了一款微型车——上汽通用五菱KiWi EV。
更重要的是,虽然也以视觉感知为主,但大疆并没有和别的企业一样选择单目视觉,而是采用了双目视觉,避免了单目视觉存在的一些弊端如识别不了静止物体等,同时也弥补了双目视觉计算量大等问题,将双目视觉的作用发挥到了最大。
从这点上来看,大疆在智能驾驶领域已经积累了不少的基础,同时也展示了其想要快速抢占市场的野心。
那么,这套系统的具体表现究竟如何?其开发过程克服了哪些困难?下一步计划是什么?经过测试和大疆车载工程师的沟通,车东西找到了这样一些问题的答案。
大疆目前的智能驾驶产品主要有D80、D80+、D130、D130+,其中D80、D130主要为基础L2,包含ACC自动巡航、自动跟车、自动泊车等功能,而80和130则代表系统运行的最高时速。D80+、D130+是指进阶版辅助驾驶,增加了激光雷达、驾驶行为识别预警摄像头、4个环视摄像头,能够达到准L3级智能驾驶。
本次测试的车辆采用的正是D80系统,也就是说,KiWi EV车型只能在时速80km/h以下启动辅助驾驶。所以测试大多分布在在城区和城市快速路。

首先是单车道居中的功能,对于基础的L2来说,这一功能非常基础,但又十分艰难,很多车企在开启单车道居中之后,车辆会出现“画蛇”的情况。
而大疆的这套系统给车东西的印象非常好,车辆可以稳稳保持在车道中间。而在没有车道线的情况下,车辆也可以跟着前车通过路口,之后,则会继续保持车道居中。
值得注意的是,车辆不单单是能够在直线道路上保持居中形式,在大曲率弯道中车辆也可以非常顺利通过,并且车辆还能保持着60km/h以上的时速通过。
另外则是车辆的自适应巡航能力,大疆这套系统给我的感受也非常好,尤其在堵车路段,车辆能够准确的通过前车的行驶情况做跟随。前车停了之后,车辆也会主动停下,前车起步之后,车辆也会起步。还可以直接跟车通过红绿灯路口。
在测试过程中,车东西也体验到了车辆应对加塞的能力。在大部分情境下,前方车辆如果进行了变道和加塞,车辆会根据前方的安全距离进行减速,整个减速的过程也比较自然,不会出现急刹急停的情况。
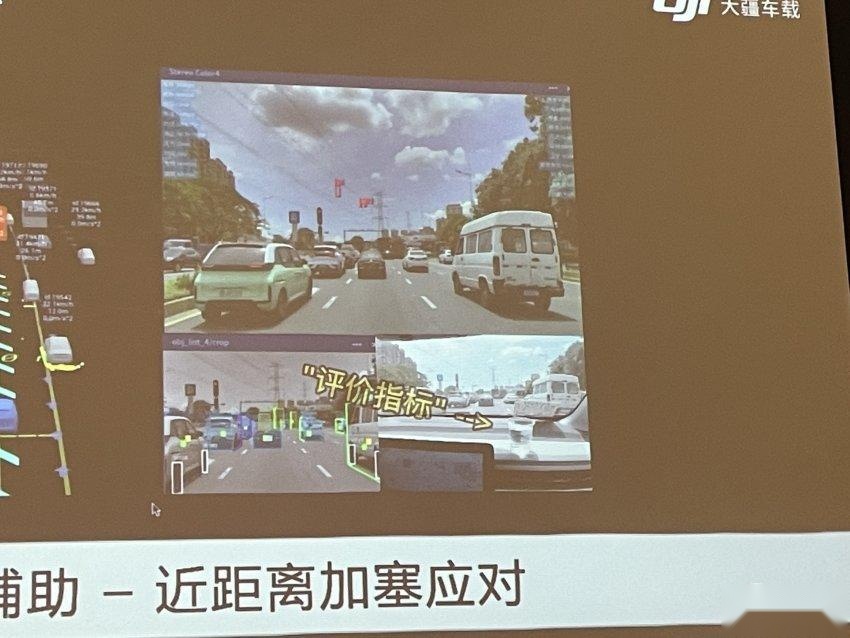
不过也有一些极端情况车辆应对并不够好。如车辆在正常行驶过程中,旁车从侧后方快速驶来并且进行加塞的时候,车辆的应对显得并不成熟,车辆无显著的减速。车东西在测试过程中发现了两次这样的场景,最终都是主动接管的情况下进行的避险。
所以综合来看,大疆的这套L2在面对比较紧急的情况下,任旧存在反应不及时的情况,但作为L2级无人驾驶,人类驾驶员有责任主动接管来避免事故。

比较有意思的是,这款车加入了一个拨杆变道的高级功能。驾驶员只要按下转向灯,车辆会自动检验测试前后方的道路情况,然后根据道路情况决定是不是转向。在旁边车辆相邻比较远的情况下,车辆会加速进行变道,而在旁车比较近的时候,车辆会放弃变道,等待合适时机再次变道。
在匝道入口时,按下转向灯拨杆之后,车辆同样也会自动进入到匝道,并通过匝道。
虽然在测试过程并没有遇到静止车辆、异形车和事故路段,但根据KiWi EV采用了双目视觉算法,这一技术能对静止物体的识别更加准确,应该也可以识别到静止车辆。
一个半小时的体验下来,车东西觉得大疆车载的这套系统几乎能满足城市内辅助驾驶的需求,目前的几项功能表现也都不错。而现场工程师介绍,在车辆交付之后会完成一次大的OTA,届时车辆的辅助驾驶能力会促进提升。
作为大疆入局智能驾驶领域后的首个量产产品,这一套无人驾驶系统很多设计都非常有意思。
首先就是产品价格相对较低,传感器方面,采用了1个前视双目摄像头+4个环视鱼眼+1个前向毫米波雷达+12个超声波雷达,并没选大量堆传感器。
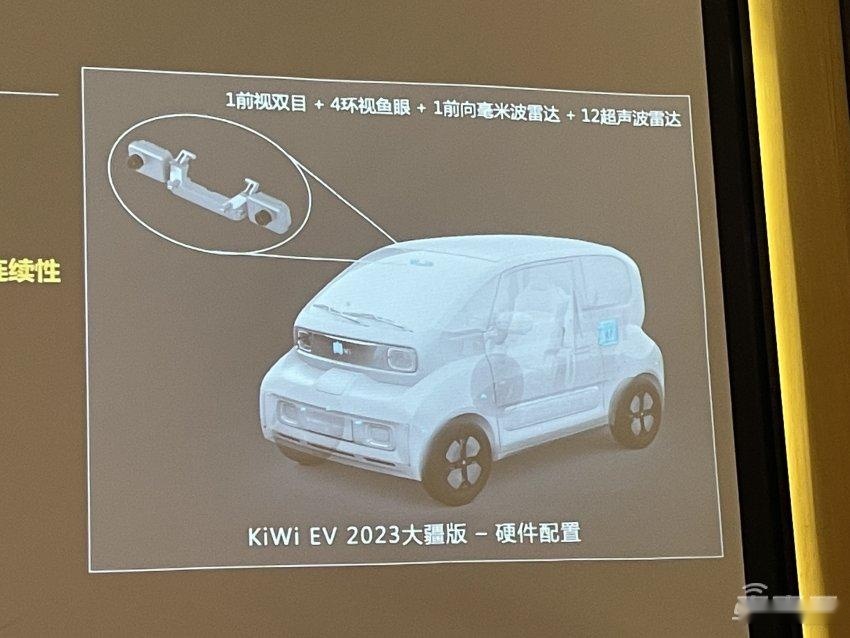
其中前视双目摄像头、环视鱼眼镜头都是大疆自己生产的产品,毫米波雷达和超声波雷达则是向零部件供应商购买。其中最贵的摄像头均为大疆自己生产,而大疆在控制成本方面又很优秀,因此整套传感器配置的成本并不算高。
芯片方面,大疆也是选择的外购,但并未透露其具体供应商与产品型号,仅知道其算力为16TOPS。
同样的,大疆方面也并未透露这套产品的最终价格,仅表示和其他方案相比,这套方案的成本非常低。
其次,大疆这套方案采用的是双目视觉算法,而目前国内采用双目视觉算法的公司并不算多,大多采用单目视觉算法。
单目摄像头需要需要大量数据喂养,并且一直更新和维护,各种长尾场景都有必要进行学习和标注,而在具体工作中,单目摄像头需要首先识别出障碍物的种类,然后再进行躲避,这一特性存在时间差,也导致多起交通事故发生。
而双目摄像头比较接近人类的眼睛,主要是通过两幅图像的视差计算来确定距离。也就是说,双目摄像头不必须了解到物体是什么,只需要识别出前方存在物体就行,这样既能提高识别的准确度,也能够最终靠计算精准进行测距。

尽管如此,目前采用双目摄像头的公司并不多,这主要跟其硬件稳定性要求高、计算量大、探测距离近等问题分不开。
双目摄像头的复杂度比单目摄像头更高,因此在模组设计上要求更高,一定要通过车规级认证。大疆方面在硬件设计上有非常深厚的积累,已经出货上万件智能产品,其硬件设计均有很高的质量认证,这种优势也延续到双目模组的硬件设计方面。
针对双目摄像头计算量大的问题,大疆方面认为,在五、六年前,车企在大多数情况下要花费很多力气才能够让双目视觉上车,但是并没有很好的效果,一部分缘由是因为计算量大。而今天,一些并行计算的加入,可以缓解计算量大的问题。
而双目视觉探测距离近的问题,大疆方面觉得这主要和车型定位有关,KiWi EV这款车仅在城市内通行,其行驶环境并不算复杂,所以并不是特别需要车辆探测太远距离,只需要保证80米左右的准确性就可以了。
后续若需要检测更远的距离,车辆可以升级更高像素的摄像头,目前KiWi EV仅采用了200万像素的摄像头,后续能够准确的通过需求升级800万像素的摄像头。
比较有意思的一点是,大疆的方案采用了四颗鱼眼镜头,在其他车企的设计中,鱼眼镜头主要是为了泊车时检测周围环境,而大疆通过独特的算法,让鱼眼镜头也可以对车侧进行仔细的检测,这样也可以很早就能发现旁边的车辆,逐步提升车侧的检测准确性。

大疆智能泊车系统则有P5、P100、P1000,能轻松实现在0~30km/h的速度范围内辅助驾驶员或完全自主代客泊车,三套解决方案都支持在室内、室外、露天或封闭停车场泊车。
其中P1000能轻松实现自主代客泊车,包括远距离自主泊车和远距离自主召唤功能。驾驶员只需要将车辆停放在停车场外的指定位置,下车离开,车辆就会自行开进停车场,并找到比较合适的车位。
大疆P100智能泊车系统性能稍弱,但与P1000的区别仅在于可遥控车辆的距离,P1000能轻松实现远距离,而P100只能实现中距离。
从具体功能来看,KiWi EV采用的应该是大疆P100智能泊车系统,按下方向盘上的泊车按钮后,车辆就开始自动寻找车位了,可以在行进的过程中自动识别出车位线泊车按键
在找到想停靠的车位之后,选择并点击开始泊车选项,之后双手双脚都可以离开,车辆就能够实现自动泊车,期间并不是特别需要驾驶员离开车辆。

据大疆方面介绍,KiWi EV只是双方合作的第一步,目前还在深化合作,在日后或许将会有更多五菱的车型搭载大疆的智能辅助驾驶技术。