.png)

直接估计深度图不属于这个议题,主要是通过mobileye的论文管中窥豹,相信离实际工程应用还有很远。 以前提过单目测距的问题,的障碍物2-D框加上摄像头的姿态和路面假设。以下根据公开发布的论文讨论具体的: 注:深度学习直接估计深度图不属于这个议题。 1、Vision-basedC with a Single Camera: Bounds on Range and Range Ra
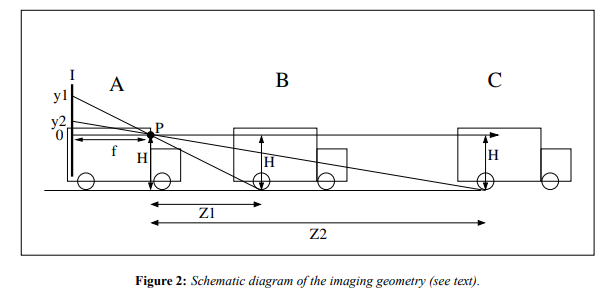
本车A,前方车B和C,摄像头P焦距f,高度H,与障碍物B/C距离Z1/Z2,B/C检测框着地点在图像的投影是y1/y2。那么y=fH/Z,所以Z=fH/y。下面是三个不同距离的估计结果:
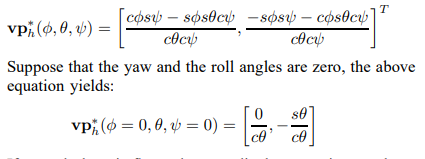
还是基于消失点原理,加上水平线,可得到道路场景几何关系。 消失点和pitch angle的关系:

4、Robust Range Estimation with a Monocular Camera for Vision-Based Forward Collision Warning System
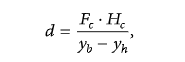
,Hc为摄像头高度,Yb是车辆框底部的垂直位置。然后可以计算出车辆距离:
5、Robust Vehicle Detection and Distance Estimation Under Challenging Lighting Conditions
计算特征点运动,由此得到自身摄像头运动,从其平移向量推出pitch angle。
这里主要是通过简单的几何关系,直接估算检测的路上车辆距离并给出可能的撞击时间。现在深度学习越来越强大,理论上得到车检测边框的同时,也可以回归车的距离。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

就是利用机器代替人眼来作各种测量和判断。它是计算机学科的一个重要分支,它综合了光学、机械、电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能
技能需要大量的人工品鉴挑选。不只印象生产功率慢,而且在人疲劳心情状态既有可能带来不可
的原理就说到这里,为了尽最大可能避免大家看到大段纯叙述性的文字头晕,下面的行文将会以FAQ的形式围绕着实现双摄像头
本车A,前方车B和C,摄像头P焦距f,高度H,与障碍物B/C距离Z1/Z2,B/C
框着地点在图像的投影是y1/y2。那么y=fH/Z,所以Z=fH/y。下面是三个不同距离的估计结果:
现已集成到各种产品中。视频信号的处理通常由需要多个电源轨的专用IC执行,最好由电源管理IC提供。本文讨论
。一个人想要完成一系列的基础活动,比如日常的工作、生活、学习运动等等,都需要借助自己身体的器官,除了大脑之外,最重要的就是我们的双眼,(工业生产)智能
很多行业都有涂胶的重要生产的基本工艺,胶体涂层的好坏必然的联系到产品的质量。因此,
和三维重建技术探讨研究总结文档,是一份很不错的参考资料,具有较高参考价值,感兴趣的可以下载看看………………
进行OCR字符及各种号码识别、质量检查、色彩与几何形状辨识和尺寸测量等。
测量精度高,但是算法复杂,运算时间长,特征匹配难,工作环境要求严苛,因此,其研究
中标识模板旋转、倾斜等造成的匹配性能降低的问题,提出一种结合垂直梯度方向线圆
是利用凸面镜反射四周图像做定位,在计算资源有限时是一种较好的选择,且
由数据采集相机和用于图像处理和I/O操作的控制器组成。 NI提供了各种可用作为
控制器的产品。 每种产品都有其独特的功能,适用于不同的应用。 其中部分差异在于处理性能、相机连接与I/O选项。 本文提供了相关这类的产品介绍及其如何应用于
频不同步,导致立体匹配不精准的问题,提出了一种基于图像处理的双目校准算法。算法首先是根据道路的先验特征模型,建立
的设计:使用National Instruments公司的IMAQ Vision、LabVIEW 、DataSocket 、SQL Toolkit 等软件配合PCI-1407PCI-6024E以及其他硬件快速开发一个基于PC的质量
进行了研究。应用光线追迹法提取空间直线折反射图像上的点,并提出一种基于最小二乘理论的二次曲线
由CMOS图像传感器、CPLD、ARM7微处理器以及SRAM构成。其中,CPLD识别