.png)

ABB机器人在示教器上宣布报警代码时,也会把产生的原因和处理的方法展现出来,关于有着丰厚的ABB机器人操作经历职工来说,能够很快提取到有用信息,并着手去处理问题。但是关于一般的ABB机器人操作职工来说,这些提示会太抽象,难以提取有用信息,更别提能一步一步的列出处理方案。所以广州长科自动化从易到难的列出一些常见的
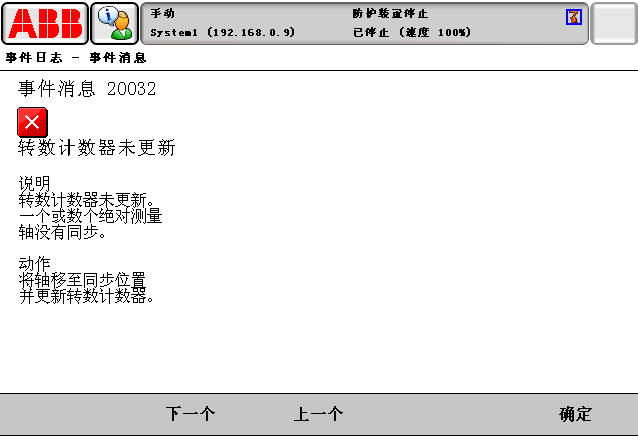
报警原因:ABB机器人有个转数计数器,是用独立的电池供电,以记载各个轴的数据。假如示ABB教器提示电池的电量过低,或许在断电情况下ABB机器人手臂方位移动了,这时候需求对转数计数器进行更新,不然机器人运转方位是禁绝的。
①手动把ABB机器人各个轴停到机械原点,便是对齐各轴上的刻度线和对应的槽;
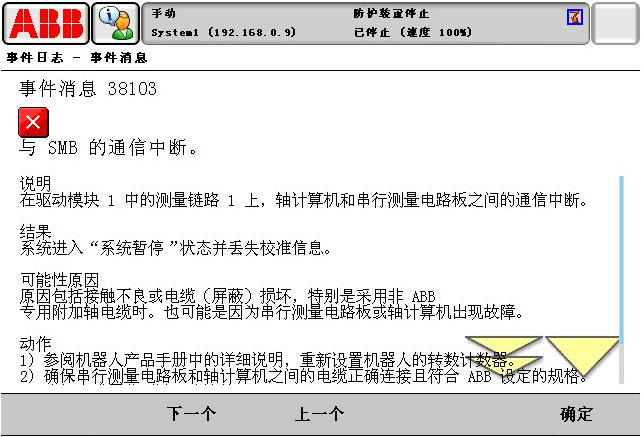
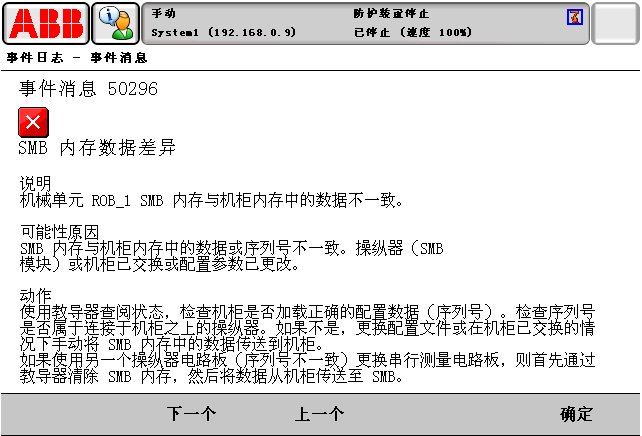
38103处理方案:查看机器人操控柜下方的x2到机器人本体的SMB线是否接好。
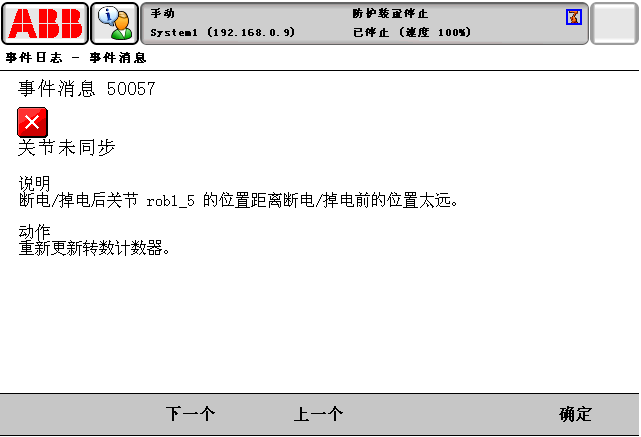
50057处理方案:1、点击“重启”,挑选“高档”,挑选B发动,机器人将康复到上一次正常状况。(正确关机方法不是直接断电,而是进入ABB,点击“从头再发动”,然后选“高档”,再挑选“关机”)
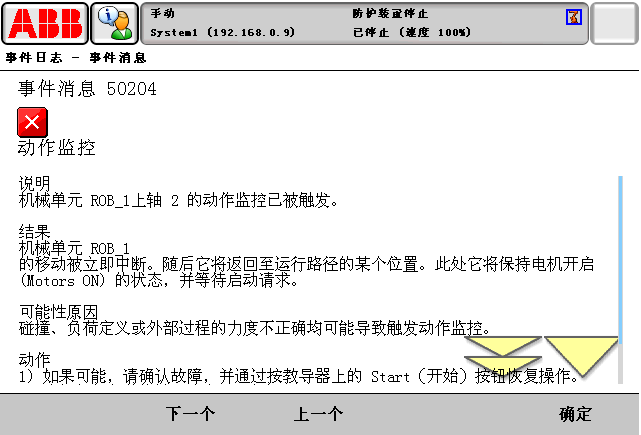
报警原因:ABB机器人产生磕碰(图中提示ABB机器人1轴有几率产生磕碰),或许电机抱闸未翻开。
50204/50056处理方法:假如的确产生了磕碰,能够先暂时封闭磕碰监控,缓慢移动ABB机器人,脱离磕碰状况;
假如未产生磕碰,则查看接触板邻近的K42、K43、K44上的抱闸操控线是否接通。
(封闭磕碰监控的过程:在操控面板中点击“监控”,从而挑选封闭手动操作监控。)
5、依据原因挑选“运用SMB内存数据更新操控柜”或“运用机柜数据更新SMB内存”;
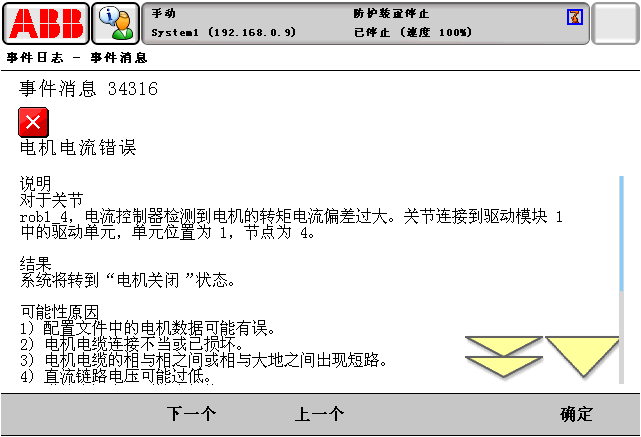
34316处理方法:依据示教器提示承认动力线衔接过错的轴,然后调整动力线的衔接。
报警原因:ABB机器人智能周期保养保护提示,用于提示用户对机器人做必要的保养和检修。
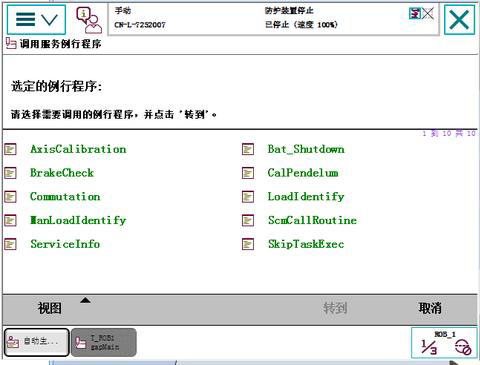
10106处理方案过程:完结对应的保养和检修后,要进行一个操作将保养与检修提示的计时复位,操作如下:
①在住菜单中点击“程序编辑器”--调试--调用例行程序
④挑选对应要复位的计时目标,1是定时保养时刻,2是操作时刻,3是齿轮箱保养时刻。这儿挑选1。
39504处理方案:对驱动单元、制动电源、动力电缆、操控模块、本体线缆、编码器线缆进行排查,找出损坏的部件进行替换。
广州长科自动化具有娴熟的修理团队,自备很多ABB机器人易损配件,能在极短的时刻内处理各种毛病,协助用户敏捷康复生产设备。
上一篇:超级机器人大战V精力指令一览
下一篇:工业机器人操作的需求留意的几点